|
Ayano Hiranaka I am a CS PhD student at University of Southern California (USC) co-advised by Professor Daniel Seita and Professor Erdem Biyik. Prior to coming to USC, I completed my Master's degree at Stanford University, where I was a research assistant at Stanford Vision and Learning Lab (SVL). I received my undergraduate degree in mechanical engineering from the University of Illinois at Urbana-Champaign (UIUC). I have also been fortunate to work as a research intern at Sony AI's Deep Generative Modeling team in Tokyo. My experiences are a unique blend of computer science and mechanical engineering, ranging from AI to robotics to mechanical design. Email / CV / Google Scholar / Github |
|
PublicationsI design AI agents, both embodied and non-embodied, that co-evolve with humans through effective communication and collaboration. My research focuses on building human-AI teams that foster mutual improvement by adapting to and learning from one another. Recently, I have been working on developing an AI-assistant that resolve human misconceptions and building a system that streamlines communication and learning between a human user and vision-language-action (VLA) models. |
|
Active Reward Learning and Iterative Trajectory Improvement from Comparative Language Feedback
Eisuke Hirota*, Zhaojing Yang*, Ayano Hiranaka, Miru Jun, Jeremy Tien, Stuart J. Russell, Anca Dragan, Erdem Bıyık International Journal of Robotics Research 2025 project page / paper Improving robot trajectories by learning reward functions aligned with human preferences, utilizing a joint represntation space of robot trajectory and natural language feedback. |
|
Human-Feedback Efficient Reinforcement Learning for Online Diffusion Model Finetuning
Ayano Hiranaka*, Shang-Fu Chen*, Chieh-Hsin Lai*, Dongjun Kim, Naoki Murata, Takashi Shibuya, Wei-Hsiang Liao, Shao-Hua Sun**, Yuki Mitsufuji** ICLR 2025 project page / paper Finetuning text-to-image diffusion models for a variety of tasks in a human-feedback-efficient manner by combining feedback-aligned representation learning and feedback-guided image generation. Work during internship at Sony AI. |
|
NOIR: Neural Signal Operated Intelligent Robot for Daily Activities
Ruohan Zhang*, Sharon Lee*, Minjune Hwang*, Ayano Hiranaka*, Chen Wang, Wensi Ai, Jin Jie Ryan Tan, Shreya Gupta, Yilun Hao, Gabrael Levine, Ruohan Gao, Anthony Norcia, Li Fei-Fei, Jiajun Wu CoRL 2023 project page / paper Brain-robot interface system for everyday activities using EEG signal decoding, primitive skills, and robot intelligence aided by foundation models. |

|
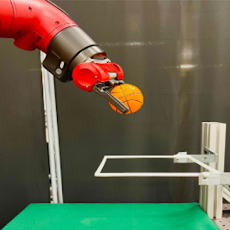
Primitive Skill-based Robot Learning from Human Evaluative Feedback
Minjune Hwang*, Ayano Hiranaka*, Sharon Lee, Chen Wang, Li Fei-Fei, Jiajun Wu, Ruohan Zhang IROS 2023 project page / paper Combining intuitive skill-based action space and human evaluative feedback, enabling a more safe and sample efficient long-horizon task learning in the real world. |
|
A Dual Representation Framework for Robot Learning with Human Guidance
Ruohan Zhang*, Dhruva Bansal*, Yilun Hao*, Ayano Hiranaka, Roberto Martín-Martín, Chen Wang, Li Fei-Fei, Jiajun Wu, Best paper award at Aligning Robot Representations with Humans workshop CoRL 2022 project page / paper A sample-efficient RLHF framework for low-level robot control policy leveraging a human-interpretable high-level state representation for active query. |
Research Projects |
|
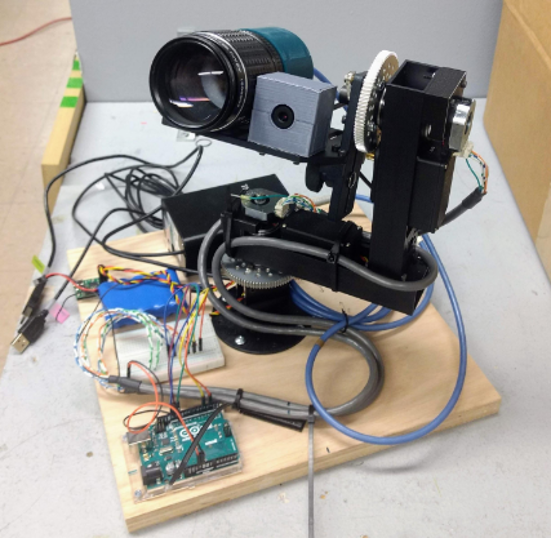
Senior Capstone Project: Transient Object Spectrometer
University of Illinois at Urbana-Champaign, 2019 project report / video
Mechatronic system that detect, track, and collect spectral data from moving, light-emitting
objects in the night sky. |
|
|
Identification of Musical Note Played on Piano via Feedback Particle Filter
University of Illinois at Urbana-Champaign, 2019 project report
Real-time identification of a note played on a piano with a probabilistic approach using
a feedback particle filtering algorithm. |

|
Investigating the Effects of ACF Spray Angle and Distance on its Performance for Micro-Drilling
University of Illinois at Urbana-Champaign, 2019 project report
Investigation of atomization-based cutting fluid spray condition to maximize tool life
for deep micro-drilling. Automatic drill parameter measurements from microscope images
using keypoint detection. |
Miscllaneous Projects |
|
Retro-Style Simulation RPG in Unity
current progress / video
In progress retro-style simulaiton RPG in Unity. |
|
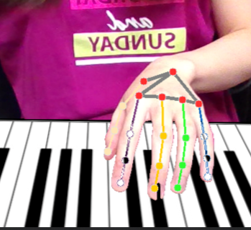
AR Piano Playing Using Real-Time Hand Tracking
Stanford University, 2022 project report
AR piano using real-time hand keypoint tracking from RGB webcam stream. |
|
Conun-Drum Bot: A Drum-Playing Humanoid Simulator
Stanford University, 2022 project report / video
Drum-player humanoid simulator that playes the beats speficied by a user. |
|
Mechanical Design Projects
University of Illinois at Urbana-Champaign, 2018-2019
A vegetable slicer operating from single crank input,
quadruped walking robot, and steel ball transporter mechanism. |
|
Website template borrowed from Jon Barron |